

اندازهگیری سطح مایعات با استفاده از سنسورهای هیدرواستاتیک، یکی از رایجترین و دقیقترین روشها در پایش مخازن، چاهها و منابع آبی است. با این حال، در محیطهایی با تلاطم شدید، نوسانات هیدرولیکی و ارتعاشات مکانیکی، سیگنال فشار اندازهگیریشده بهطور طبیعی دچار نویز و ناپایداری میشود.
در چنین شرایطی، الگوریتمهای فیلترینگ و حذف نویز نقش کلیدی در تبدیل داده خام به اطلاعات قابل اتکا ایفا میکنند.
ماهیت نویز در اندازهگیری هیدرواستاتیک
سنسور هیدرواستاتیک سطح مایع را بر اساس رابطه مستقیم بین فشار و ارتفاع ستون سیال محاسبه و استخراج میکند؛ به این معنا که هرگونه تغییر در فشار، بهصورت مستقیم به تغییر در سطح تعبیر میشود. در چنین سیستمی، دقت اندازهگیری وابستگی زیادی به پایداری سیگنال فشار دارد. از اینرو، هر عامل خارجی که موجب ایجاد نوسان در فشار اندازهگیریشده شود، در صورتی که ارتباطی با تغییر واقعی سطح سیال نداشته باشد، بهعنوان نویز در سیگنال در نظر گرفته میشود. این نوسانات میتوانند باعث ایجاد خطا در تفسیر دادهها شوند و درک صحیح از سطح واقعی را با چالش مواجه کنند.
منابع اصلی نویز
نویز در اندازهگیری هیدرواستاتیک میتواند از عوامل مختلفی ناشی شود که هر یک بهنوعی باعث ایجاد نوسان در سیگنال فشار میشوند و دقت اندازهگیری سطح را تحت تأثیر قرار میدهند. این منابع معمولاً به شرایط فیزیکی سیال، وضعیت مکانیکی سیستم و همچنین عوامل الکترونیکی مرتبط هستند. مهمترین منابع ایجاد نویز عبارتاند از:
• تلاطم سطحی سیال که موجب تغییرات لحظهای در فشار میشود
• ضربههای هیدرولیکی ناگهانی که نوسانات شدید و کوتاهمدت ایجاد میکنند
• ارتعاشات سازهای مخازن که به سنسور منتقل شده و سیگنال را دچار اختلال میکنند
• نویز الکترونیکی مدار سنسور که از اجزای داخلی یا تغذیه ناشی میشود
• تداخلهای ناشی از کابلکشی و محیط صنعتی که میتوانند بر کیفیت سیگنال تأثیر بگذارند
پیامدهای نبود فیلترینگ مؤثر
در غیاب فیلتر مناسب، سیگنالهای دریافتی از سنسور بهصورت مستقیم و بدون پردازش مورد استفاده قرار میگیرند که این موضوع میتواند کیفیت دادههای اندازهگیری را بهطور قابلتوجهی تحت تأثیر قرار دهد. در چنین شرایطی، نوسانات ناشی از نویز بهعنوان تغییرات واقعی سطح تفسیر میشوند و عملکرد کلی سیستم دچار اختلال میگردد. پیامدهای این وضعیت شامل موارد زیر است:
• داده سطح بهصورت ناپایدار و پرنوسان نمایش داده میشود و امکان تحلیل دقیق را کاهش میدهد
• آلارمهای کاذب بهدلیل تفسیر اشتباه نوسانات فعال میگردند و میتوانند باعث تصمیمگیریهای نادرست شوند
• الگوریتمهای کنترلی بهدلیل دریافت دادههای ناپایدار دچار نوسان شده و عملکرد بهینه خود را از دست میدهند
• اعتماد به داده اندازهگیری کاهش مییابد و اپراتور یا سیستم کنترلی نمیتواند به نتایج اتکا کند
بنابراین فیلترینگ در این سیستمها صرفاً یک اقدام بهینهسازی نیست، بلکه یک نیاز بنیادین و ضروری برای دستیابی به دادههای پایدار و قابل اعتماد در فرآیند اندازهگیری سطح محسوب میشود.
فیلترهای کلاسیک در سنسورهای هیدرواستاتیک
فیلتر میانگینگیری متحرک (Moving Average)
فیلتر میانگینگیری متحرک بهعنوان یکی از سادهترین و پرکاربردترین روشهای فیلترینگ در سیستمهای اندازهگیری شناخته میشود. در این روش، دادههای ورودی در یک بازه زمانی مشخص میانگینگیری میشوند تا نوسانات لحظهای و تغییرات کوتاهمدت در سیگنال کاهش یابد. این فرآیند باعث میشود سیگنال خروجی نرمتر و پایدارتر به نظر برسد و تغییرات ناگهانی که ناشی از نویز هستند، تا حد زیادی حذف شوند.
ویژگیهای اصلی این فیلتر عبارتاند از:
• نوسانات کوتاهمدت را حذف میکند و باعث هموار شدن سیگنال میشود
• پاسخ سیستم را کندتر میسازد، زیرا دادهها با تأخیر میانگینگیری میشوند
با توجه به این ویژگیها، این فیلتر برای محیطهایی که دارای تلاطم ملایم هستند، گزینه مناسبی محسوب میشود. با این حال، در شرایطی که نوسانات شدید و سریع در سیگنال وجود دارد، استفاده از این روش میتواند باعث ایجاد تأخیر در پاسخ سیستم شود و واکنش به تغییرات واقعی سطح با فاصله زمانی همراه باشد.
فیلتر پایینگذر (Low-Pass Filter)
فیلتر پایینگذر یکی از روشهای متداول در پردازش سیگنال است که با هدف جداسازی تغییرات واقعی از نوسانات ناخواسته به کار میرود. در این نوع فیلتر، سیگنال ورودی بهگونهای پردازش میشود که تغییرات آهسته و تدریجی که بیانگر سطح واقعی سیال هستند، عبور داده شوند و در مقابل، نوسانات سریع و لحظهای که معمولاً ناشی از موج، ارتعاش یا اغتشاشات محیطی هستند، تضعیف یا حذف گردند.
هدف فیلتر پایینگذر بهصورت خلاصه شامل موارد زیر است:
• عبور تغییرات آهسته (سطح واقعی)
• حذف نوسانات سریع (موج و ارتعاش)
نکته کلیدی در استفاده از این فیلتر، تنظیم دقیق فرکانس قطع است. این پارامتر مشخص میکند که چه بخشی از سیگنال بهعنوان تغییرات مفید در نظر گرفته شود و چه بخشی بهعنوان نویز حذف گردد. بنابراین، انتخاب صحیح فرکانس قطع نقش تعیینکنندهای در ایجاد تعادل بین دقت اندازهگیری و پایداری سیگنال دارد و میتواند عملکرد کلی سیستم را بهطور مستقیم تحت تأثیر قرار دهد.
فیلترینگ تطبیقی؛ پاسخ به محیطهای پویا
در محیطهای پرنوسان، شدت و ویژگیهای نویز بهصورت ثابت باقی نمیماند و بسته به شرایط عملیاتی، ممکن است بهطور مداوم تغییر کند. در چنین شرایطی، استفاده از فیلترهای ثابت نمیتواند همواره عملکرد بهینهای ارائه دهد. فیلترهای تطبیقی با در نظر گرفتن این موضوع، بهگونهای طراحی شدهاند که پارامترهای خود را متناسب با شرایط لحظهای سیگنال تنظیم کنند و رفتار خود را با وضعیت محیط تطبیق دهند.
این فیلترها با تغییر دینامیک تنظیمات خود:
• در شرایط آرام سریع پاسخ میدهند و تغییرات واقعی را بدون تأخیر قابلتوجه منتقل میکنند
• در شرایط متلاطم سختگیرانهتر فیلتر میکنند تا اثر نویز و نوسانات ناخواسته کاهش یابد
بهکارگیری این رویکرد باعث میشود که سیستم بتواند در مواجهه با تغییرات محیطی عملکردی متعادل داشته باشد. در نتیجه، این روش بهطور قابل توجهی پایداری داده سطح را افزایش میدهد، بدون آنکه پاسخگویی سیستم به تغییرات واقعی سطح دچار افت یا تأخیر قابلتوجه شود.

الگوریتم کالمن و کاربرد آن در پایش سطح
اصول عملکرد الگوریتم کالمن
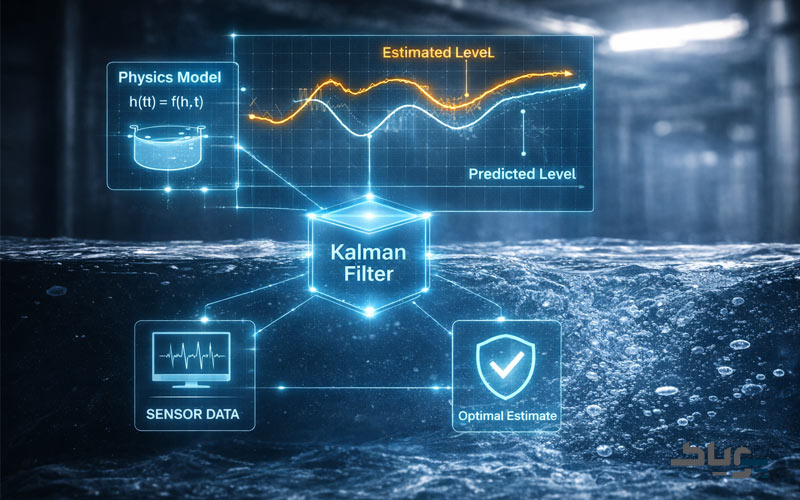
فیلتر کالمن یکی از روشهای پیشرفته در پردازش و تخمین دادههاست که در آن، سطح واقعی بهعنوان یک متغیر حالت در نظر گرفته میشود و هدف، دستیابی به بهترین برآورد ممکن از این متغیر است. این الگوریتم با ترکیب اطلاعات دریافتی از سنسور و یک مدل مشخص از رفتار سیستم، تلاش میکند مقدار واقعی سطح را در حضور نویز و عدم قطعیت تخمین بزند.
در این فرآیند، فیلتر کالمن بهصورت همزمان از دو منبع اصلی اطلاعات استفاده میکند:
• مدل فیزیکی تغییر سطح که روند و رفتار مورد انتظار سیستم را توصیف میکند
• داده واقعی سنسور که اندازهگیریهای لحظهای را در اختیار قرار میدهد
با ادغام این دو منبع اطلاعاتی و تحلیل آنها بهصورت آماری، فیلتر کالمن قادر است مقدار بهینه سطح را تخمین بزند. این رویکرد باعث میشود تأثیر نویز در دادهها کاهش یابد و در عین حال، تغییرات واقعی سطح نیز با دقت مناسب دنبال شوند.
مزایای کالمن
فیلتر کالمن بهدلیل ساختار تحلیلی خود، در بسیاری از کاربردهای اندازهگیری بهعنوان یک گزینه دقیق و قابل اعتماد شناخته میشود و میتواند عملکرد سیستم را در شرایط نویزی بهبود دهد.
- حذف مؤثر نویز تصادفی و بهبود کیفیت سیگنال
- حفظ پاسخ سریع به تغییرات واقعی سطح بدون ایجاد تأخیر قابلتوجه
- قابلیت تشخیص دادههای غیرعادی و جلوگیری از تأثیر آنها بر خروجی
در محیطهای صنعتی و منابع آب متلاطم، کالمن یکی از دقیقترین و کارآمدترین گزینهها برای پایش سطح محسوب میشود.
- بیشتر بخوانید: انواع سطح سنج و کاربردهای آن
حذف دادههای پرت (Outlier Rejection)
در برخی شرایط، نوسانات ناگهانی در سیگنال میتوانند دادههایی ایجاد کنند که با روند واقعی سطح همخوانی ندارند و بهعنوان دادههای پرت شناخته میشوند. این نوسانات معمولاً ناشی از عوامل زیر هستند:
• ضربه مکانیکی
• حباب هوا
• اغتشاش لحظهای
الگوریتمهای حذف داده پرت با هدف جلوگیری از تأثیر این مقادیر غیرعادی، سیگنال را تحلیل میکنند و موارد نامعتبر را شناسایی میکنند. این الگوریتمها معمولاً با بررسی:
• نرخ تغییر غیرطبیعی
• انحراف شدید از روند معمول
از ورود این دادهها به محاسبه سطح جلوگیری میکنند و به این ترتیب، پایداری و دقت اندازهگیری حفظ میشود.
ترکیب فیلترینگ دیجیتال و مکانیکی
پایداری اندازهگیری تنها به پردازش نرمافزاری محدود نمیشود و عوامل فیزیکی نیز نقش مهمی در کیفیت سیگنال دارند. در واقع، ترکیب راهکارهای مکانیکی و دیجیتال میتواند عملکرد سیستم را بهطور قابلتوجهی بهبود دهد. بهترین نتیجه زمانی حاصل میشود که موارد زیر بهصورت همزمان در نظر گرفته شوند:
• محفظههای ضدارتعاش سنسور برای کاهش انتقال لرزش
• انتخاب نقاط نصب مناسب در مخزن جهت کاهش تأثیر اغتشاشات
• استفاده از فیلترینگ دیجیتال چندمرحلهای برای پردازش دقیقتر سیگنال
این رویکرد جامع باعث میشود بار پردازش از روی فیلترینگ نرمافزاری کاهش پیدا کند و در عین حال، عمر مفید سنسور نیز افزایش یابد.
موازنه بین پایداری و زمان پاسخ
هر فیلتر در فرآیند پردازش سیگنال، نوعی مصالحه بین پایداری داده و سرعت پاسخ ایجاد میکند و انتخاب شدت فیلترینگ مستقیماً بر رفتار خروجی تأثیر میگذارد.
• فیلتر شدید : داده پایدار ولی کند
• فیلتر ضعیف : پاسخ سریع ولی پرنوسان
بنابراین طراحی صحیح الگوریتم فیلترینگ باید با توجه به شرایط کاربردی انجام شود و عواملی مانند نوع کاربرد اندازهگیری سطح، سرعت تغییرات واقعی سیال و میزان اهمیت واکنش سریع یا پایداری داده در تصمیمگیری لحاظ گردد.
نقش فیلترینگ در کنترل و تصمیمگیری
داده پایدار و قابل اعتماد از سطح، نقش مهمی در عملکرد صحیح سیستمهای کنترلی دارد و بدون آن، تصمیمگیری دقیق با چالش مواجه میشود. این دادهها در کاربردهای مختلف از جمله موارد زیر ضروری هستند:
• مدیریت مخازن
• کنترل پمپها
• پیشگیری از سرریز یا خشککارکرد
در این میان، فیلترینگ مناسب باعث میشود سیگنالهای خام و پرنوسان به دادهای پایدار و قابل اتکا تبدیل شوند و در نتیجه، اطلاعات خروجی بتوانند بهعنوان یک مبنای مطمئن برای کنترل و تصمیمگیری مورد استفاده قرار گیرند.
جمعبندی
در سنسورهای هیدرواستاتیک، چالش اصلی صرفاً اندازهگیری فشار نیست، بلکه استخراج دقیق سطح واقعی از میان نویزهای محیطی است که میتوانند سیگنال را دچار اختلال کنند.
الگوریتمهای فیلترینگ و حذف نویز در این میان نقش کلیدی دارند و باعث میشوند:
• پایداری اندازهگیری تضمین شود
• آلارمهای کاذب کاهش یابد
• قابلیت اعتماد سیستم افزایش پیدا کند
در نهایت، استفاده از ترکیبی مناسب از فیلترهای کلاسیک، تطبیقی و مدلمحور میتواند به عملکردی پایدار و قابل اتکا در محیطهای متلاطم و پرارتعاش منجر شود.









